1 min to read
ROS Autonomous Navigation
Learn to make your robot move autonomously in any environment
ROS Autonomous Navigation
Youtube Video
Set up workspace
git clone https://github.com/bytesByHarsh/Robotics_ws/
cd Robotics_ws
git submodule update --init --recursive
catkin_make
source devel/setup.sh
Note: Do not add Robotics_ws in your catkin_ws/src
I am just using the folder name Robotics_ws instead of catkin_ws
Atom Robot
roslaunch atom world.launch
Autonomous Navigation
Installation
sudo apt install ros-noetic-dwa-local-planner
sudo apt install ros-noetic-gmapping
GMapping
Terminal 1:
roslaunch atom gmapping_demo.launch
Terminal 2:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/atom/cmd_vel
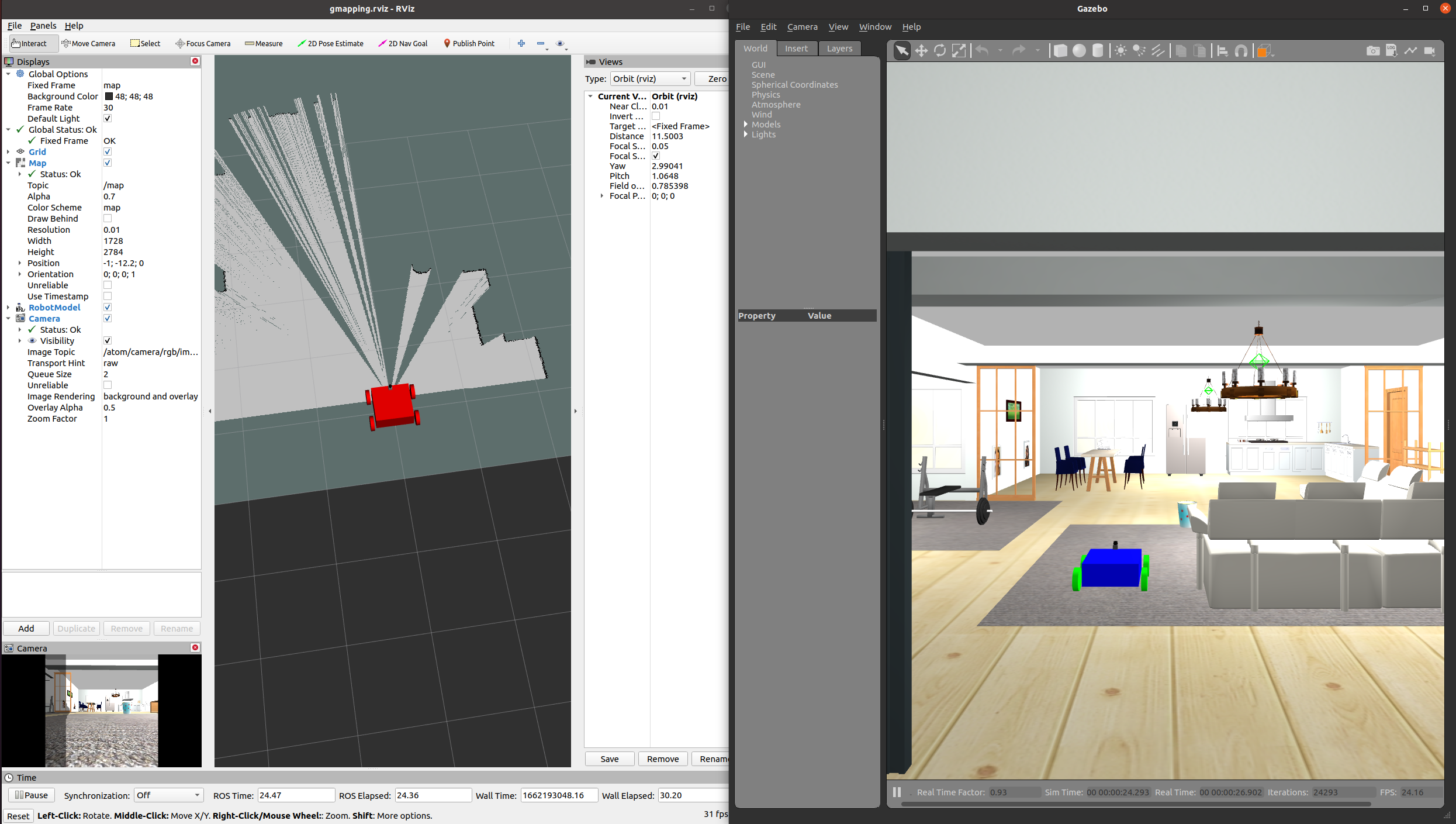
Terminal 3:
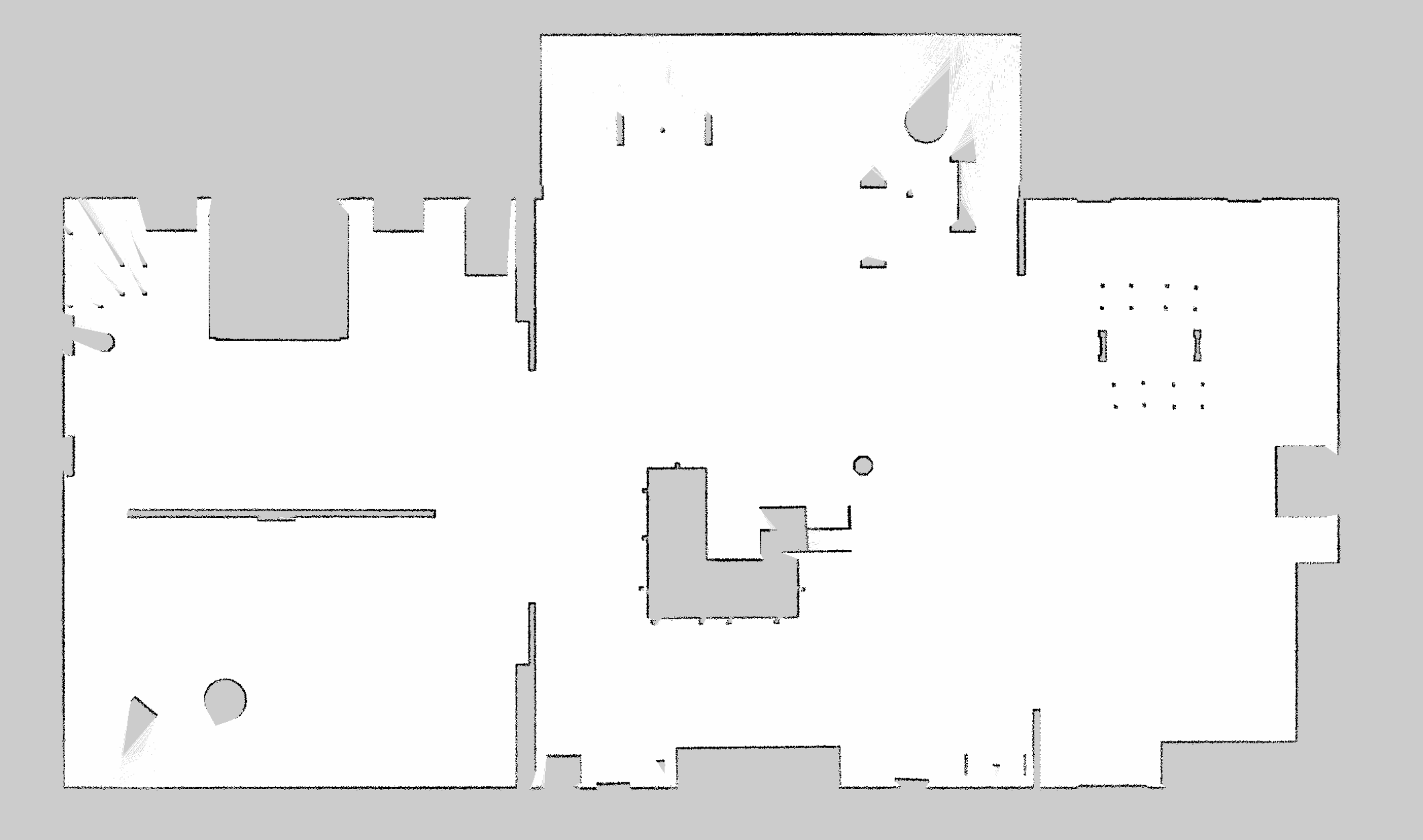
cd <location to save map>
rosrun map_server map_saver -f map
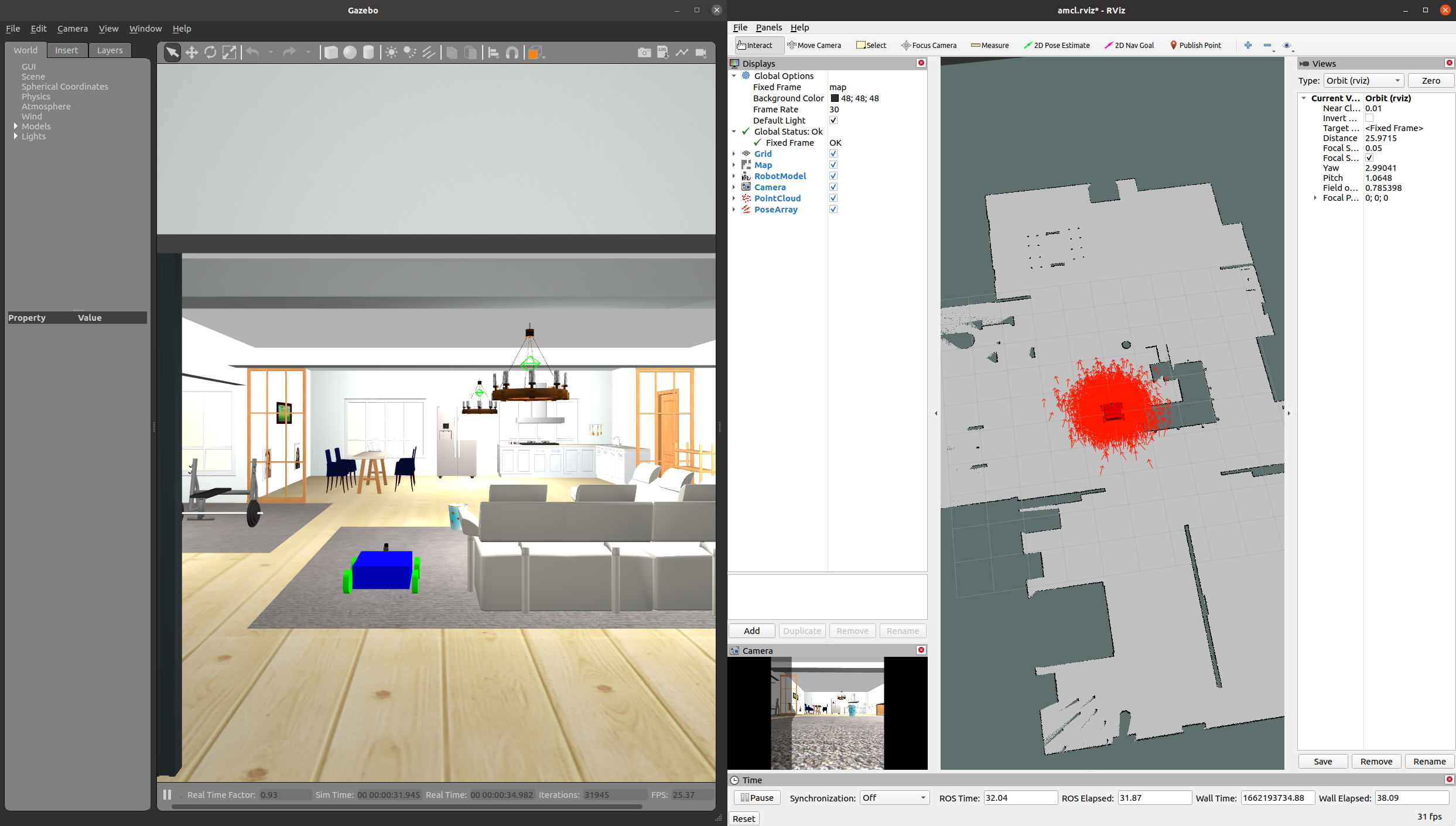
AMCL
Terminal 1:
roslaunch atom localization.launch
Terminal 2:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/atom/cmd_vel
Now you after moving bot a little you will be able to see that it is able to localize itself properly.
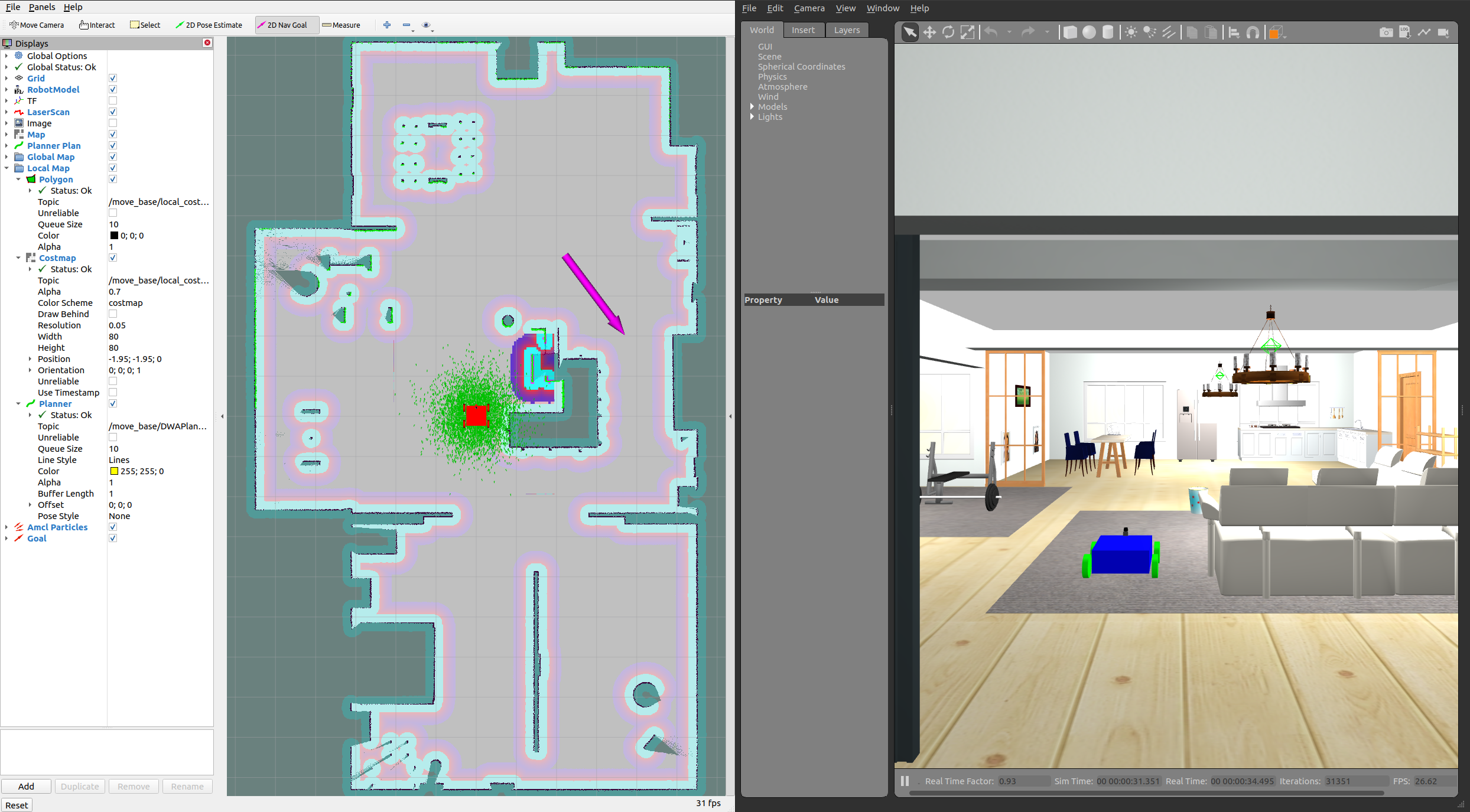
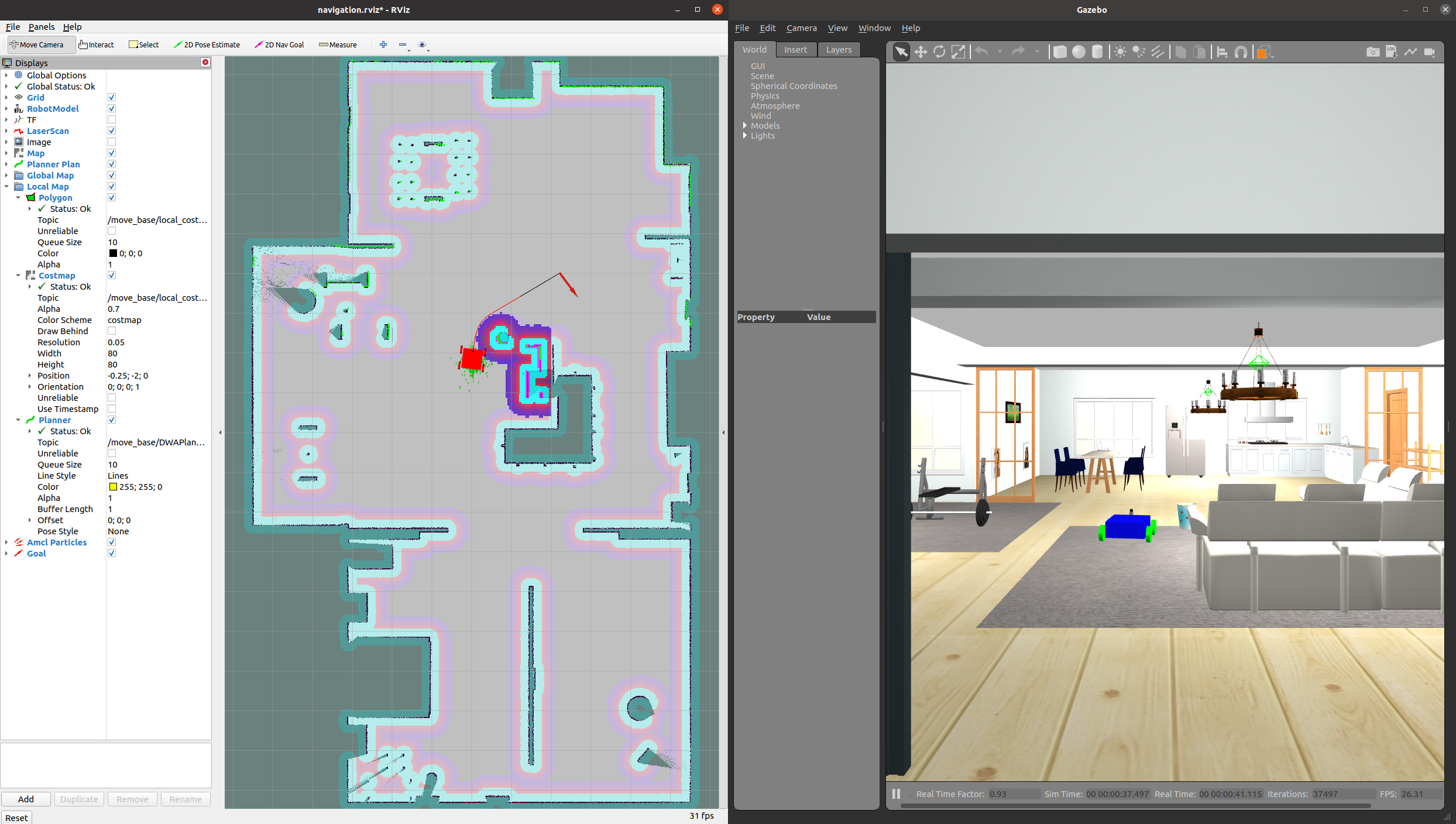
Navigation
Terminal 1:
roslaunch atom navigation.launch
Use RVIZ for 2D Navigation




Comments